ロボット技術
塗装ロボットPainting robot
小口径鉄管内面の素地調整から塗装、
検査まで一貫した塗装作業
水力発電所の小口径水圧鉄管など、人力では施工が困難であった小口径鉄管内面の素地調整から塗装、
検査まで一貫した塗装作業を行います。
塗装ロボットの特徴
- 1
- 点検、素地調整、塗装、検査まで一連の塗装作業の効率化と安全性の向上を図ります。
- 2
- 他メーカの一般的なサンドブラスト方式に比べ、素地調整水・屑を確実に回収できます。
- 3
- 水平・垂直・傾斜・直管・曲管など、あらゆる設置状況下で施工できます。
- 4
- 作業員が鉄管内に入ることがないため、管内の塗装を安全に行えます。
- 5
- 鉄管長は約500m程度まで対応できます。また、500m以上も相談に応じます。
- 6
- ロボットはユニットごとに小分けして運搬、搬入できるため、大きな仮設設備は必要ありません。
塗装ロボットの機能紹介
- 1
- 素地調整は超高圧水(140~245Mpa)によるウォータージェットブラスト方式でロボット先端の特殊ノズルを回転させながら噴射し、旧塗膜・錆などを除去します。
- 2
- 超高圧水に防錆材を混入させ、一時防錆を行います。
- 3
- 塗装はノズルと塗装面の距離を常に一定に保つ機構により、安定した品質が確保でき、1回塗りで200~300μmの施工を行います。
- 4
- ロボットに搭載するカメラと塗膜厚測定プローブ(ブラシ付き)により、全周任意の箇所を測定・記録できます。
小口径鉄管内面塗装用ロボット
(超高圧水による素地調整工法)

(超高圧水による素地調整工法)
内径430mm~710mm用
内径700mm~1100mm用
紹介VTR
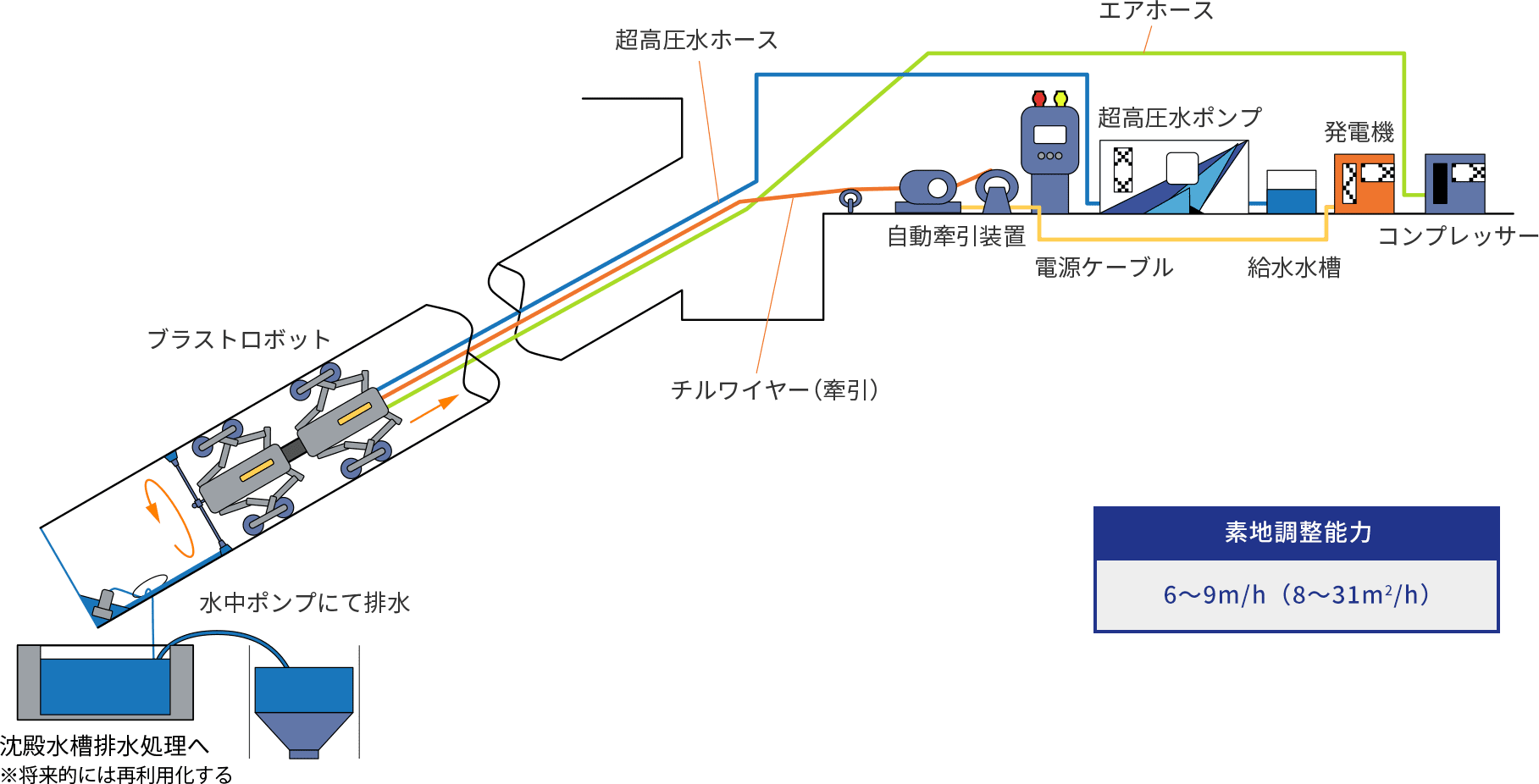
超高圧水素地調整システム
超高圧水ブラスト装置

- ●ロボット先端に取り付けたノズルを回転(約800rpm)させ超高圧水(245Mpa)を噴射し、旧塗膜・錆の除去し素地調整します。
- ●ロボットは下流側から上流側へ自動牽引装置にて牽引します。(牽引速度は任意に設定可能)
- ●素地調整の程度はロボットの牽引速度を調整することで変更可能です。
- ●ブラストユニットは長さ1190mm〜1370mm 重量80kg(分割可能)になります。
- ●システムは4tトラックに積載して搬入します。(ポンプ、発電機、コンプレッサー等)
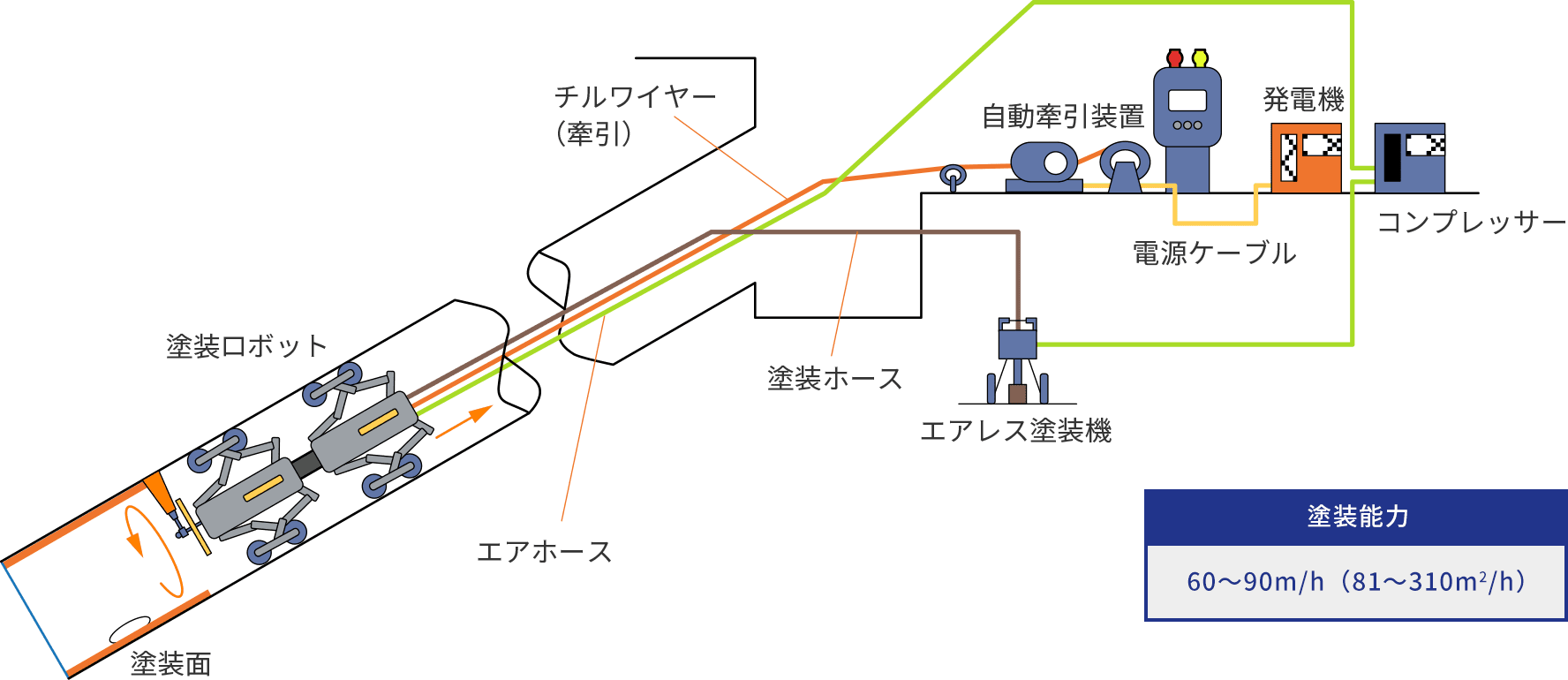
塗装システム
塗装装置

- ●塗装ノズルと塗装面の間隔を一定に保ちながらノズルを回転(約100rpm)させエアレス塗装機より圧送した塗料を塗布します。
- ●ロボットは下流側から上流側へ自動牽引装置にて牽引します。(牽引速度は任意に設定可能)
- ●塗膜厚はロボットの牽引速度を調整することで変更可能です。
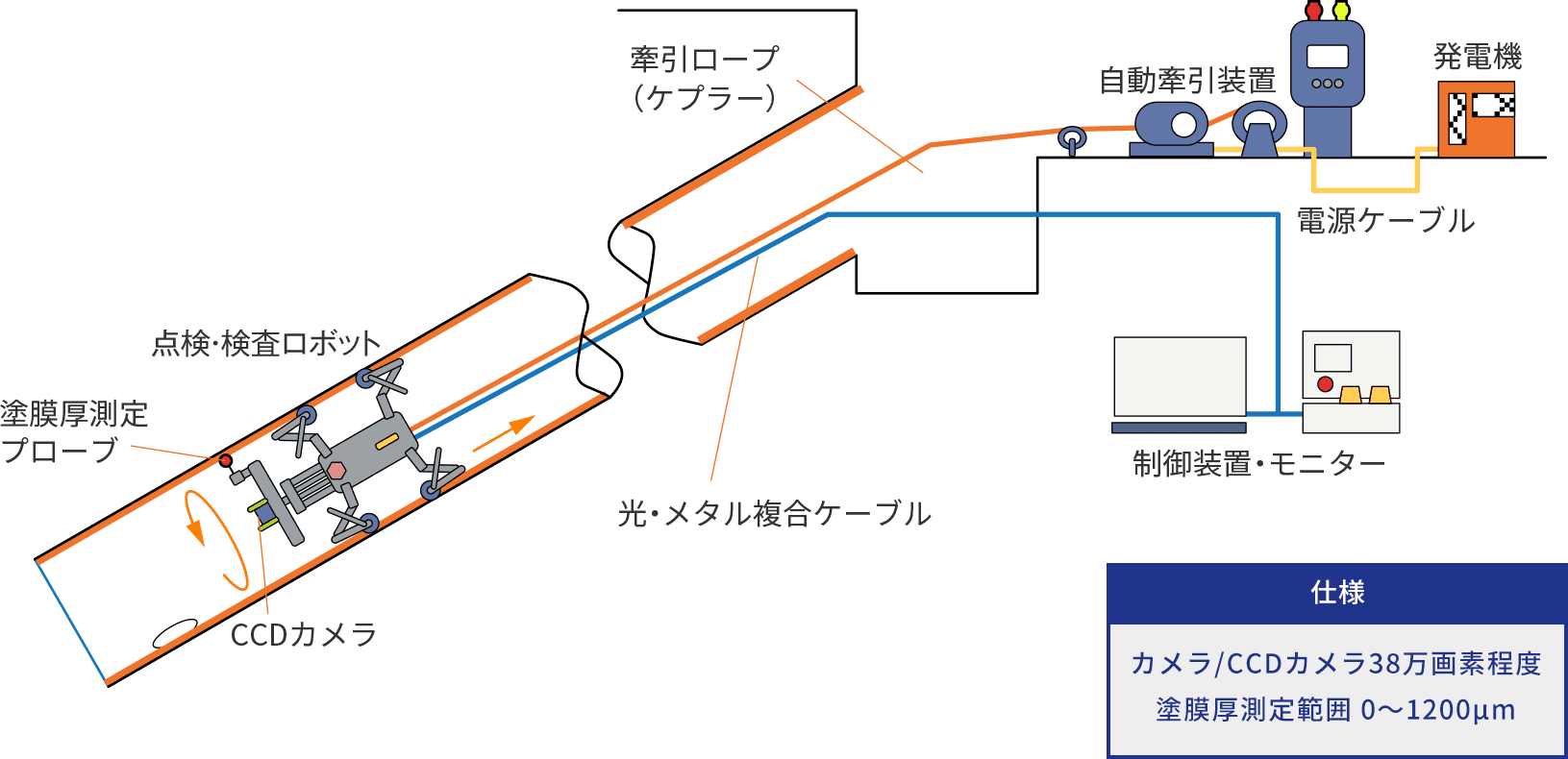
塗膜厚測定システム
点検・検査装置

- ●CCDカメラはチル・パン機能により360°全方向確認ができます。
- ●塗膜厚測定はプローブ付アームを遠隔操作し、任意の箇所を測定できます。(測定位置も特定できます。)
- ●牽引ロープはケプラー製を使用し塗装面のダメージを最小にします。
- ●ロボットは長さ1240mm 重量120kg(分割可能)になります。
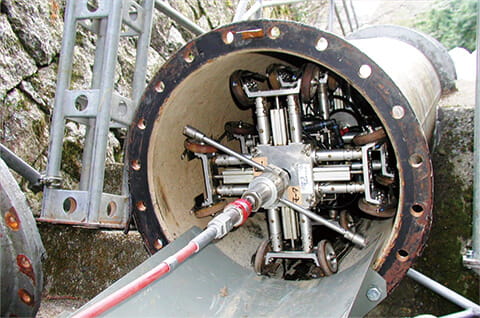
塗装ロボットの施工状況

