ロボット技術
水中排砂ロボットUnderwater terrain measurement robot
抜水不可能な水槽・水路や沈殿池などの堆積物を
流水状態のまま浚渫・清掃
水中排砂ロボットにより、抜水不可能な水路や水槽の堆積物の浚渫・清掃を行います。
高感度TVカメラとソナーを搭載し、陸上や船上の操作室からの遠隔操作により、水中の堆積物を自走しながら浚渫・清掃します。
水中排砂ロボットの特徴
- 1
- コンパクト
4t車に搭載できるコンパクトサイズで、移動・運搬を容易に実施できます。
- 2
- 強力
高性能モーターとスクリューにより、水深1.2~20mまで貝混じり土砂を浚渫できます。
- 3
- 安全
陸上の操作室からの遠隔操作により、安全性の向上を図ります。
- 4
- 環境にやさしい
濁水を発生しにくい構造で、作業中に過度な濁りが発生しません。
後処理装置との組み合わせにより、浚渫土砂の強制脱水や処理水の浄化を行います。
- 5
- 経済的
低重心構造により、流速に耐性がある上、設備を停止せず浚渫・清掃作業を行います。
水中排砂ロボットの仕様
水中排砂ロボット(S型)仕様

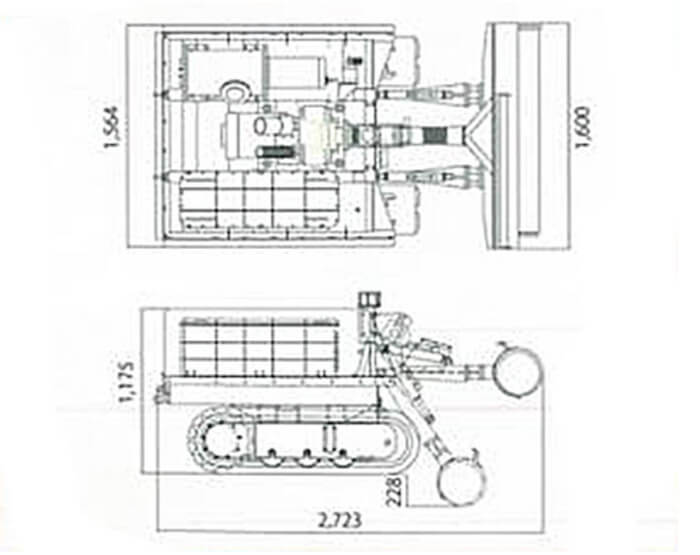
| 最大排砂量※ | 14m3/h |
|---|---|
| 搭載ポンプ口径 | 100mm |
| 搭載ポンプ動力 | 15kw |
| 搭載ポンプ排水量 | 70〜90m3/h |
| 走行・作業能力 | 5.5kw |
| 走行速度 | 3〜12m/min |
| 接地圧 | 6.9kPa |
| 耐流速 | 2.0m/sec |
| 最大登坂角 | 30度 |
| 最大水深 | 10m |
※排砂量は砂分混合比率20%の場合を示す。
水中排砂ロボット(M型)仕様

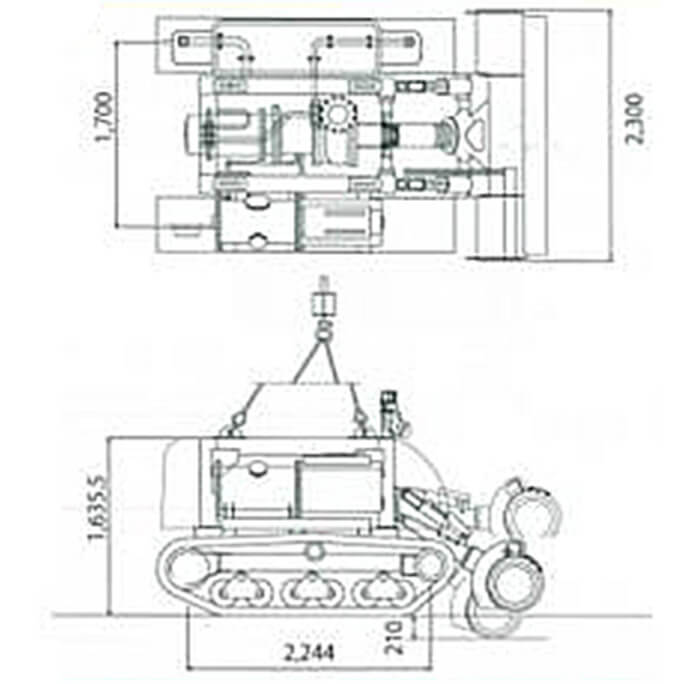
| 最大排砂量※ | 50m3/h |
|---|---|
| 搭載ポンプ口径 | 200mm |
| 搭載ポンプ動力 | 55kw |
| 搭載ポンプ排水量 | 300~400m3/h |
| 走行・作業能力 | 18.5kw |
| 走行速度 | 3〜12m/min |
| 接地圧 | 14.7kPa |
| 耐流速 | 2.0m/sec |
| 最大登坂角 | 30度 |
| 最大水深 | 20m |
※排砂量は砂分混合比率20%の場合を示す。
主な施工場所
- 1
- 河川や湖沼など、大型浚渫船や重機作業が困難な狭隘部での底泥の浚渫
- 2
- 工場プラントや発電所などの取水、排水設備に堆積した土砂や貝殻などの浚渫
- 3
- 水門ゲート部や港の岸壁部、取水堤防に堆積したヘドロや土砂などの浚渫
- 4
- 上下水道や工業用水道などの取水設備(取水路、沈砂池など)の堆積物の浚渫
サブマード工法
サブマード工法とは水中地形計測システム(SST)による施工場所の事前・事後測量と水中排砂ロボットによる浚渫・清掃作業、
サイクロン付振動篩・シックナー・フィルタープレスによる土砂・泥水処理を組み合わせた、環境に配慮したクリーン工法です。
サブマード工法フローチャート
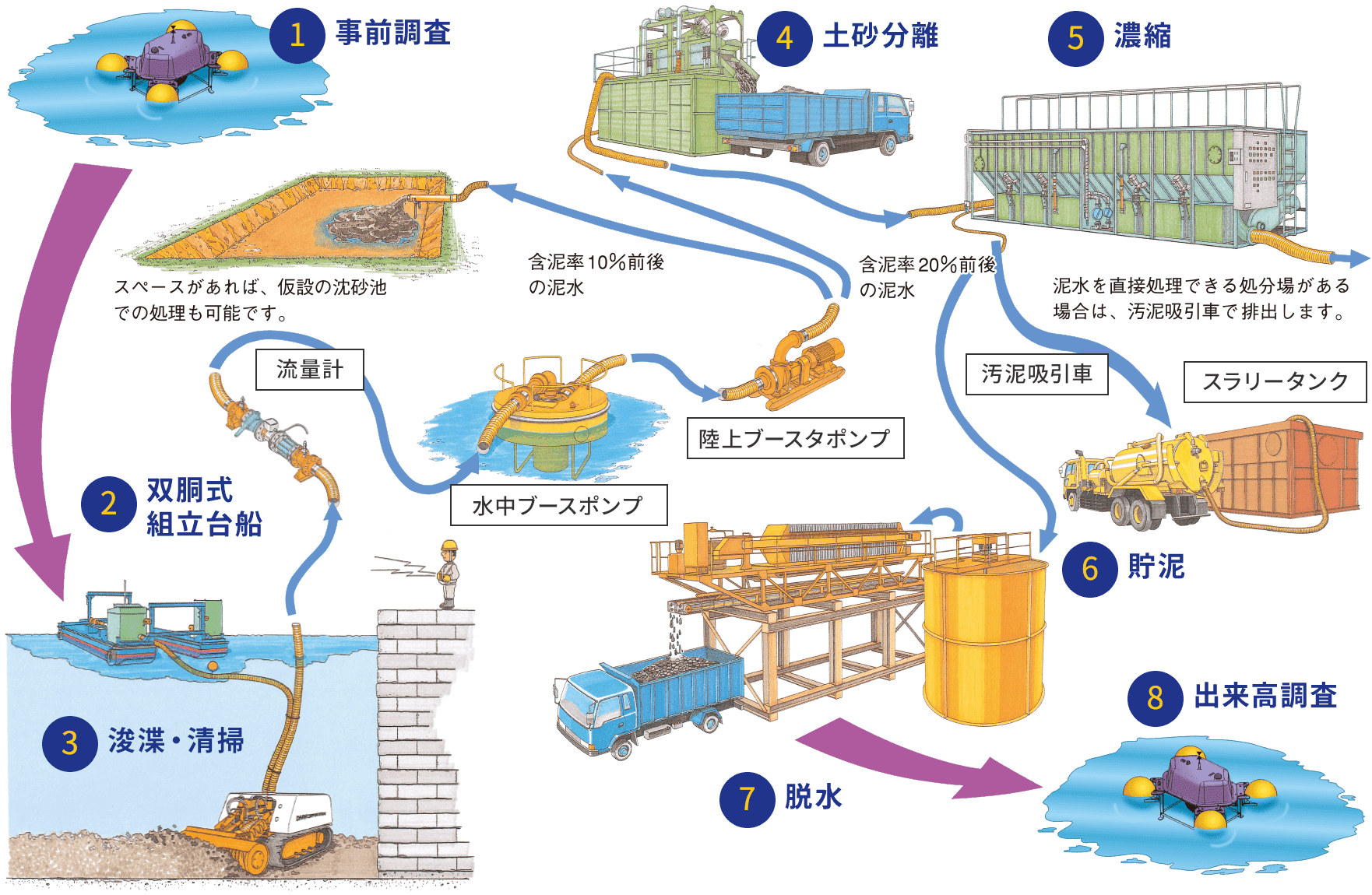
- 1
- 事前調査(SST 水中地形計測装置)
水中地形を計測し、算出します。
- 2
- 双胴式組立台船
ロボットを直接吊上げたり、自足で船上を登坂させ、保守・点検を行えます。
- 3
- 浚渫・清掃(水中排砂ロボット)
濁りや臭気の発生の少ない浚渫作業が行えます。
- 4
- 土砂分離(サイクロン付振動篩)
粒径74μm以上の砂分・ゴミ等を分離・排出します。
- 5
- 濃縮(シックナー)
泥水中に凝集剤を加えることでフロックを作り沈殿させます。
処理水はSS濃度30~50ppmで放流します。
- 6
- 貯泥(インテークタンク)
泥水を一旦貯留します。
- 7
- 脱水(フィルタプレス)
高圧力で泥水を絞り、含水率50%前後の脱水ケーキとして排出します。
- 8
- 出来高調査(SST)
工事終了後、再度SST測量することで出来高調査ができます。
紹介VTR